 |
| The R/V Roger Revelle
prepares to go to sea. |
|
 |
| Acoustic source packages on deck.
The white cylinders are electronics,
pressure compensation, and
battery packs. The big white
cylindrical thing in the middle of
the cage is the 250 Hz acoustic
source. Note the miles and miles of
wire rope and kevlar cable. |
|
 |
| The R/V Revelle departs
Honolulu. |
|
 |
| Peter and Lisa attach a
light and a radio
beacon to the top of the buoy to
help locate it when the
mooring is recovered. It is hard to
find things on the ocean's surface. |
|
 |
| Surface buoy and glass
balls are ready to go at
first light. |
|
 |
| The surface buoy is raised over the
ship's side by the crane and a
mulititude of tag lines. The wire
rope of the mooring goes through the traveling
block at far right, and around the
ship's stern to the buoy, with
various people keeping it from hanging up
on anything. A thermistor destined for 150 m
depth is visible on the cable. |
|
 |
Once the buoy is released, it drifts
behind the ship. The ship steams
at a steady 1-1.5 kts upwind to keep
tension on the wire. Since the
mooring takes 12 hrs to deploy, the
deployment starts 12 nm away from
the intended anchor site. Hopefully,
the wind direction does not change
during the deployment...
The anchor seen in the foreground will be
needed about 12 hours later. |
|
 |
| The wire rope is fed out using the
Lebus winch. Sometimes it rains
at sea. |
|
 |
| Glass balls (the small yellow things
dragging behind the ship) are inserted into the
mooring to account for the weight
of the wire rope, thus keeping
near uniform tension at every depth
of the mooring. A microcat, which
records temperature and salinity,
is clamped onto the cable here. |
|
 |
| The source package cage is laid down and dragged to the
stern of the ship to prepare its deployment. The white, 4-element hydrophone
array cable is zig-zagged up and down the deck
for its deployment and to be attached to the electronics package
in the cage. The bitter end of the mooring line is held
to the cleat at lower left. The black thing on
the hydrophone cable near the lower left corner of the cage is an
acoustic interrogator which is used to track the position of the
source cage. |
|
 |
| Great care is taken to make waterproof connections between
the hydrophone array and the electronics package, which is the silver
pressure case directly behind Lisa. |
|
 |
| This particular cruise was well documented - to appear in a video edition
of SIO's Explorations. |
|
 |
| The tilt meter/compass package, used to measure the tilt and orientation
of the mooring line, is attached to the mooring line and
to the top of the hydrophone array. The plastic bin holds the slip line that will be
used in a moment. |
|
 |
| The tilt meter/compass package and the hydrophone array is slowly
fed out to sea using a slip line - a loop of line that will be pulled back
in once the tension of the mooring has been transferred to the source cage.
Lloyd holds a hydrophone element to be sure it gets over the side safely. |
|
 |
| The tension of the mooring line is on the cage now. The
hydrophone cable is to be carefully secured so that it safely crosses
from the wire rope to the cage. When the cage goes over the side, these
cables can take quite a beating. The hydrophone cable connection to the
electronics package is in the foreground; the acoustic interrogator is
20' up the mooring line+hydrophone cable. |
|
 |
| The 3600 lb cage is ready to go over. The ship's crane lifts it over the stern,
with all hands holding one tag line or another. Generally a tense moment, so there
are no photos here of the source actually going over... |
|
 |
| Another view. While putting the source over the side may be stressful and
even dangerous, fortunately John Kemp has taken stress management classes so he knows
how to count to 10 properly before getting upset. |
|
 |
| Another view of the Lebus winch that is used to pay out the wire rope
(jacketted with plastic) and kevlar cable. |
|
 |
| Once the source package goes over the side, there is not much else
to put out but about 3500 m (about 2 miles) of wire rope and kevlar cable. The day grows long, the people
grow weary, while the kevlar continues to pay out. |
|
 |
| A central North Pacific sunset. |
|
 |
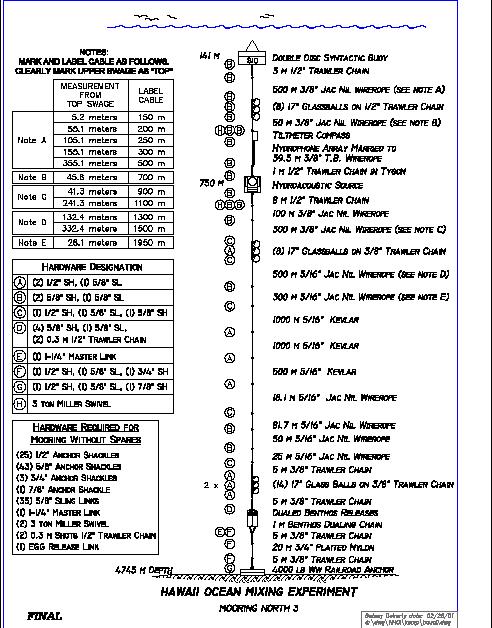
| A final burst of activity near the end of the mooring. The acoustic
releases are on deck and attached to the mooring line. The releases will be about
30 m above the anchor (see
the mooring blueprint). The chains and nylon rope
connecting the acoustic releases and the anchor are being prepared here. There is a
set of glass balls (already over the stern at the time this picture was taken)
directly above the releases to bring them to the surface when the mooring is recovered. |
|
 |
| The acoustic releases have been put over the stern and the mooring
is presently held by another slip line at center. If the tension of the mooring
is transferred too soon to the anchor, the mooring may deploy prematurely.... The
location of a mooring needs to be fairly accurate - the actual and desired positions
are typically within 100 m or so. |
|
 |
| Once the proper drop point has been reached, the slip line is let out to
transfer the tension of the mooring to the anchor, and
the ship's crane lifts the plate on which the anchor sits
to encourage it to leave the ship. |
|
 |
| Another view of an anchor drop; photo taken from a different
mooring. The anchor will fall about 45 minutes (literally) before
reaching the ocean bottom. |
|
 |
| Bye anchor!! The anchor has the entire mooring attached to it as
it falls, of course, and so the anchor falls back towards the mooring about 750
m before it lands on the bottom. Because of the momentum it carries in this
process, the source cage will briefly overshoot its intended 750-m depth
by 150 m. Rare frontal photo of John Kemp. |
|
 |
| The orange balls are acoustic transponders. These instruments are deployed in
a square about 7 km on a side on the ocean bottom
around the mooring. The acoustic interrogator (mentioned
above) sends out acoustic pings that these instruments detect and reply with their
own pings. The acoustic travel times of these pings are recorded by the electronics
in the source package and these data are used to correct the tomographic data for the
motion of the moorings. Typical positioning accuracy is about 1 m. |
|
 |
| After the mooring is deployed, an expendable sonobuoy is tossed over
the side to listen for the transmissions of the acoustic source to be sure it
is working. The sonobuoy deploys a small hydrophone to about 60' depth, and
radios what it detects on an FM frequency. On the ship, some distance away, we
can then listen to the sounds detected by the sonobuoy. This is a *.wav file
(1.3 MB) recording of an actual source transmission on this cruise - it begins
with several seconds of noise and the transmission lasts 67 seconds (garbled near
the end). The source signal is a "phase-coded linear maximal shift register
sequence with 250 Hz center frequency". |
|
 |
| With the mooring deployed, we depart leaving the ocean to the
albatrosses, the mahi-mahi, the giant squid, and the fin whales. We'll be back
in six months to recover these moorings. To view pictures of the mooring
recovery, view
these pictures in reverse order. |
|
{kind=link}
{kind=link}