POST
MaSCOT Report, Part 2: Mechanical Design
As described in part 1, the prototype system architecture is:
{:.center}
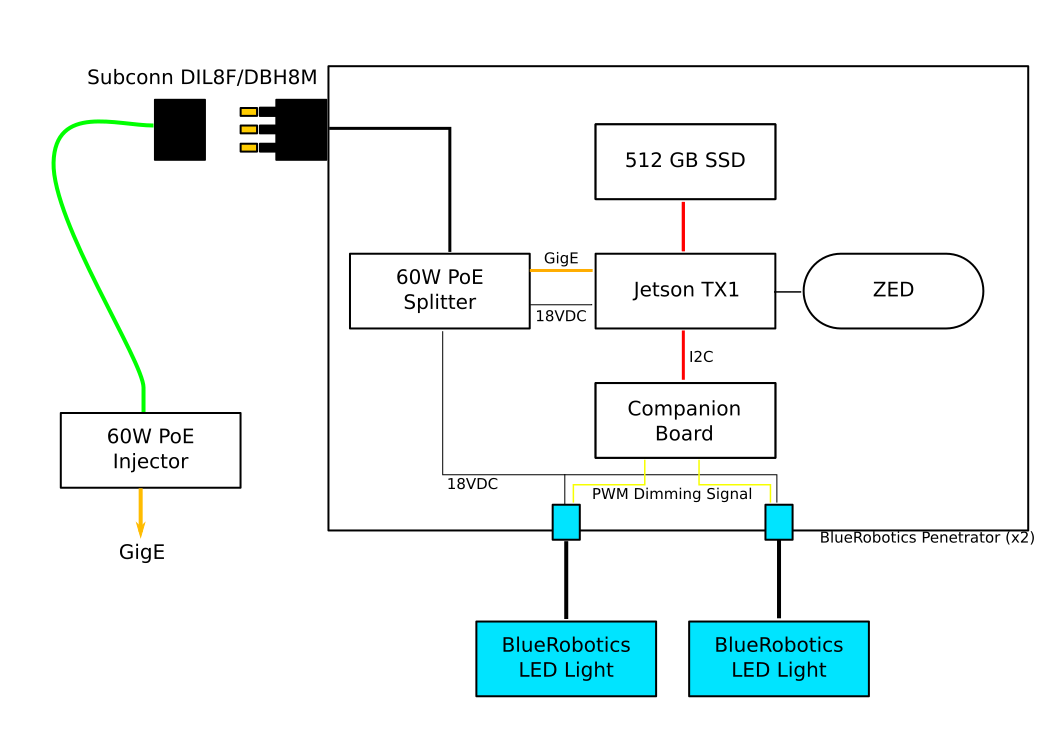
The mechanical design was the one element I did not handle myself. I worked with a mechanical engineer at APL to design an inexpensive, easy to machine shallow water housing with enough space for the Zed and Jetson. The final design consists of a single 12" x 12" block of Delrin with a single cavity hogged through it. The front and back faces have o-ring seals and tapped holes for retaining bolts for the endplates, and a series of top-to-bottom through-holes along the sides provide mounting points.
The front endplate is plexiglass, and the back is aluminum with the three threaded bulkhead penetrators: the Subconn ethernet connector and two Blue Robotics penetrators for the lights.
{:.center}
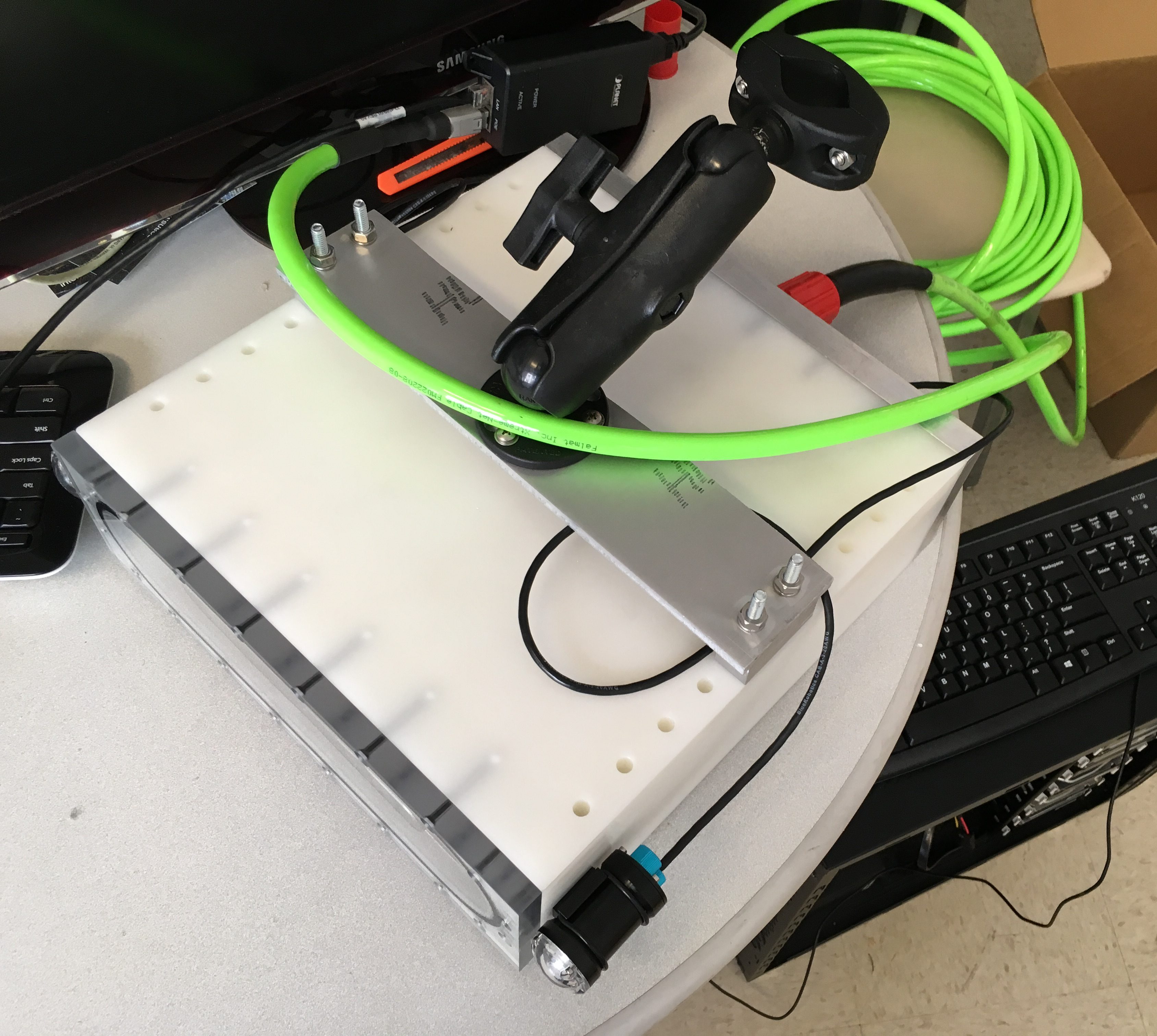
It is a relatively simple design and was inexpensive to produce in the APL machine shop… I won’t pretend it’s something you could knock up in your garage, but it gets the job done.
Internal assembly was done by an undergraduate at APL (Robert). I provided all of the hardware and he mounted it onto a aluminum mounting tray which in turn mounts to the back endplate; this provides a continuous thermal path to the water. The Jetson has its stock fan and heatsink, a relief hole in the backplane, and a decent amount of thermal grease on everything. I didn’t require Robert to be fastidious about documenting everything, so the backplane was made-to-measure.
Robert also added a crossbar with a Ram Mounts ball mount. For most of the testing I used a Ram Mounts pole-mount adaptor (shown in the photo above) to attach the unit to a 10 foot piece of conduit. Assembled, the system is ~25-30 lbs in air and only a few pounds heavy in water. It is still unwieldy to maneuver on the pole, particularly with the stiff ethernet cable, but it is certainly manageable.