POST
Packaging Challenges for Subsea Power Transfer
We’re working with a UW-Bothell Senior ME Capstone team to develop a low-cost technology demonstrator/testbed for wireless data and power transfer. We’ve partnered with Wibotic, a UW spin-off. Their wireless power transfer technology is awesome, and I’m eager to have a simple demonstrator on hand to show to sponsors.
The students are finishing up their system level design and starting to dive into the detailed design. In the spirit of trying to stay one step ahead of them, I fired up my copy of SharpieWorks and sketched out the current state of play.
Rather than investigate vehicular charging (which introduces lots of challenges with integrating with the power system in a COTS vehicle, docking, etc.), we’ve asked the students to look at the problem of “power muling.” That is, using a vehicle to service an instrument in the field, recharging the device and exfiltrating data.
We have a Blue Robotics BlueROV2 (another awesome company), which will serve as the mothership. We’ve asked the students to design a system which will bolt onto the BlueROV as a power transmitter. They also need to design an underwater sensor node which contains the power receiver as well as a few basic sensors.
As this is a student project, we’re always keeping an eye on the scope. To my mind, this is a nice design challenge with interesting mechanical, electrical and firmware/software chunks, but very little of it – other than the packaging – is so hard or essential that we couldn’t just put in a very simple solution for now and expand on that capability in the future. This is a sales tool, after all.
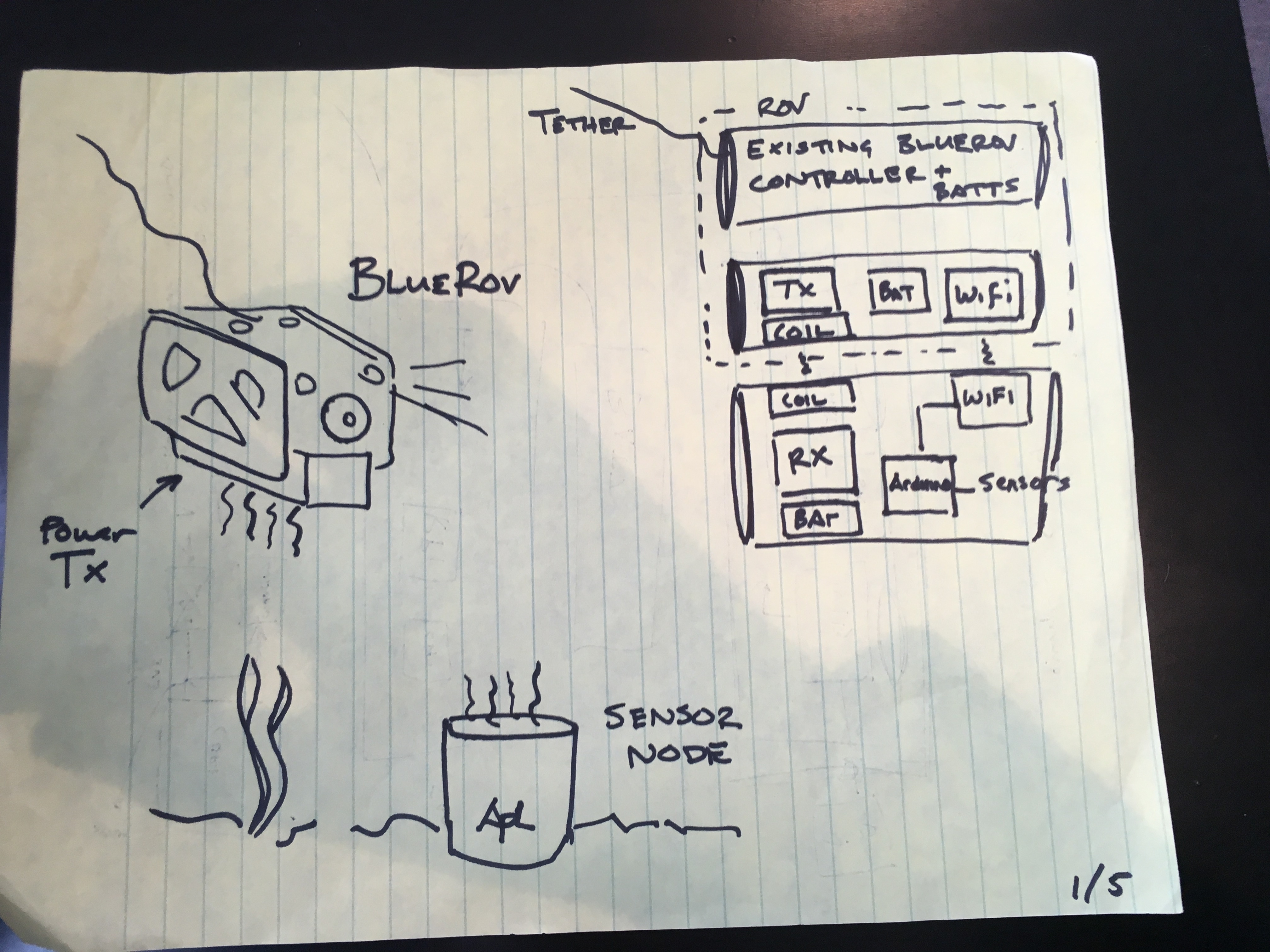
The core block diagram is shown on the right side of the picture above. The Wibotic system consists of a transmitter (black box) and receiver (white box), and coils for both sides (disregard the power supply in the upper left):

For data transfer we are evaluating a pair of Mikrotik SXTG-2HnD. These are high power (1600mW), highly directional dual-chain 2.4GHz wireless access points. They’re inexpensive, and I’m pretty familiar with the RouterOS, so they seemed like a good starting point for wireless data transfer. It’s the inelegant “big hammer” solution: lots of power + lots of antenna gain, but because it’s COTS, the up-front risk is low. I’d like to have the time and money to do a more thorough characterization (and explore other options) eventually.

The BlueROV is a so-called hybrid ROV, in that it does not get its power over the tether. Instead, it has a hefty battery pack onboard. Rather than tap into the ROV’s power supply (and reduce its range), we’re pushing for the student system to have its own power supply. If nothing else this reduces the number of connections between the existing BlueROV pressure vessels and the charging enclosure.
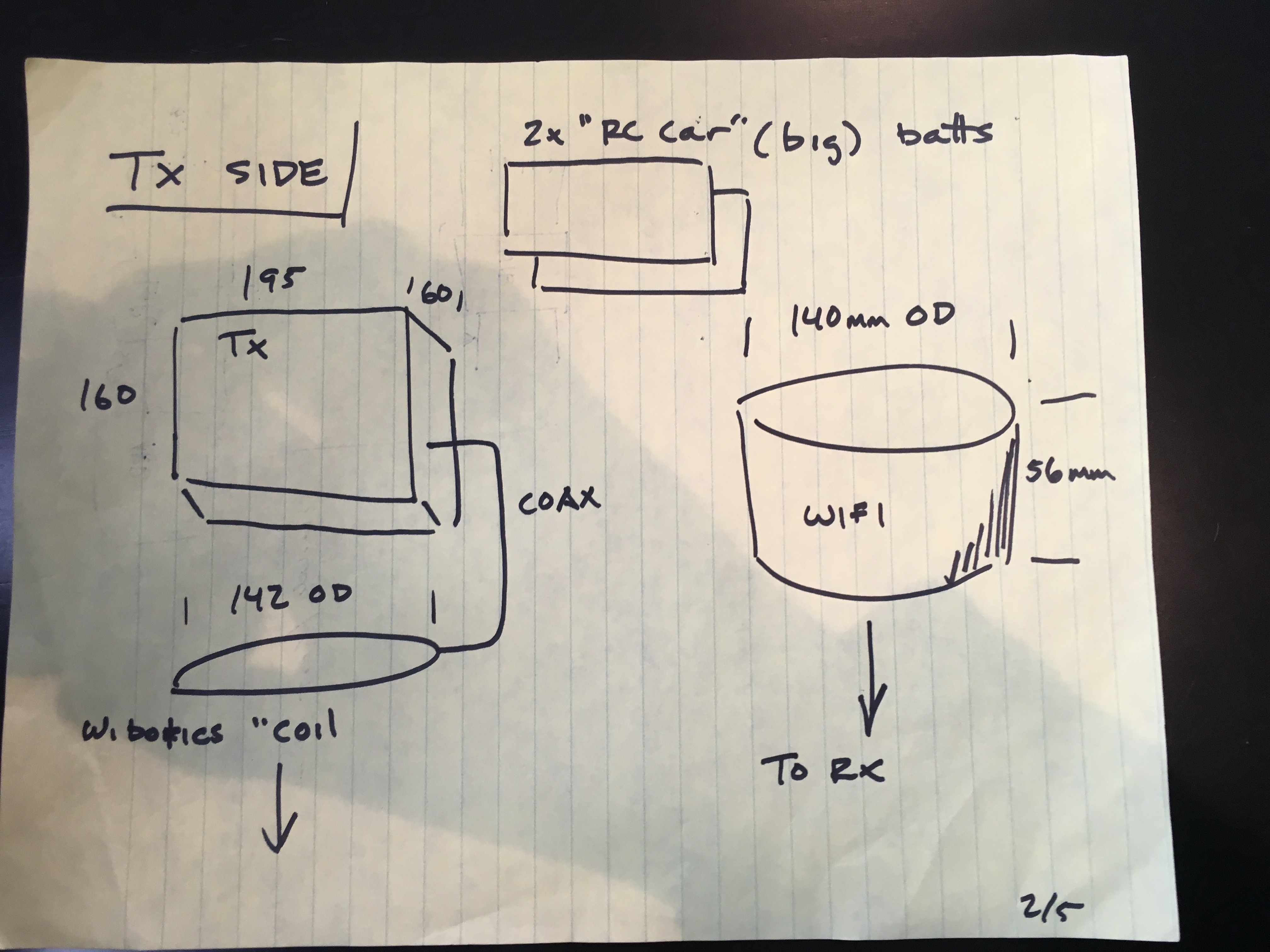
The ROV side needs to package:
- the Wibotic Tx (black box above, or the circuit board inside)
- the Wibotic Tx coil @ 142mm OD (larger than black paddle above)
- the charging supply batteries (still speccing, but likely 2 “RC car” size batteries)
- the SXT (above)
The Wibotic coils start as a bare PCB but we can pot them and place them in the wet if we’d like. No such luck with the SXT. In any case, we have the best chance of successful power / data transfer by getting the charge coils / SXTs properly aligned with minimal distance (and particularly minimal amounts of seawater) between their faces.
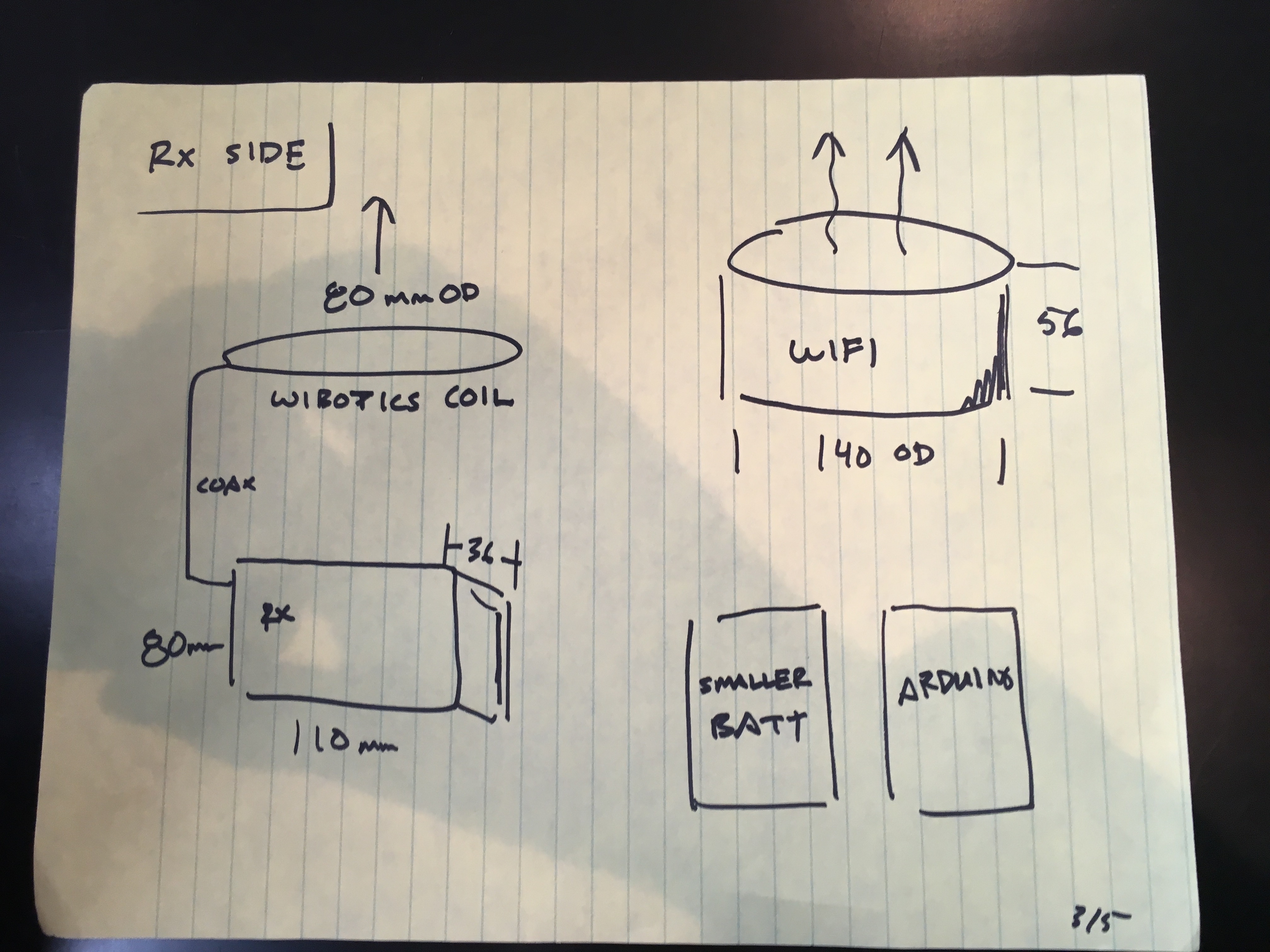
The Sensor node includes:
- the Wibotic Rx (white box above or the circuit board inside)
- the Wibotic Rx coil @ 80mm OD (white paddle above or the circuit board inside)
- the SXT
- an Arduino Leonardo Eth or similar
- some sensors
- a small battery to run the system for ~5-7 days.
{:center}
Way, way back we thought we might be able to use BlueRobotics 4" enclosures to keep things simple:
{:center}
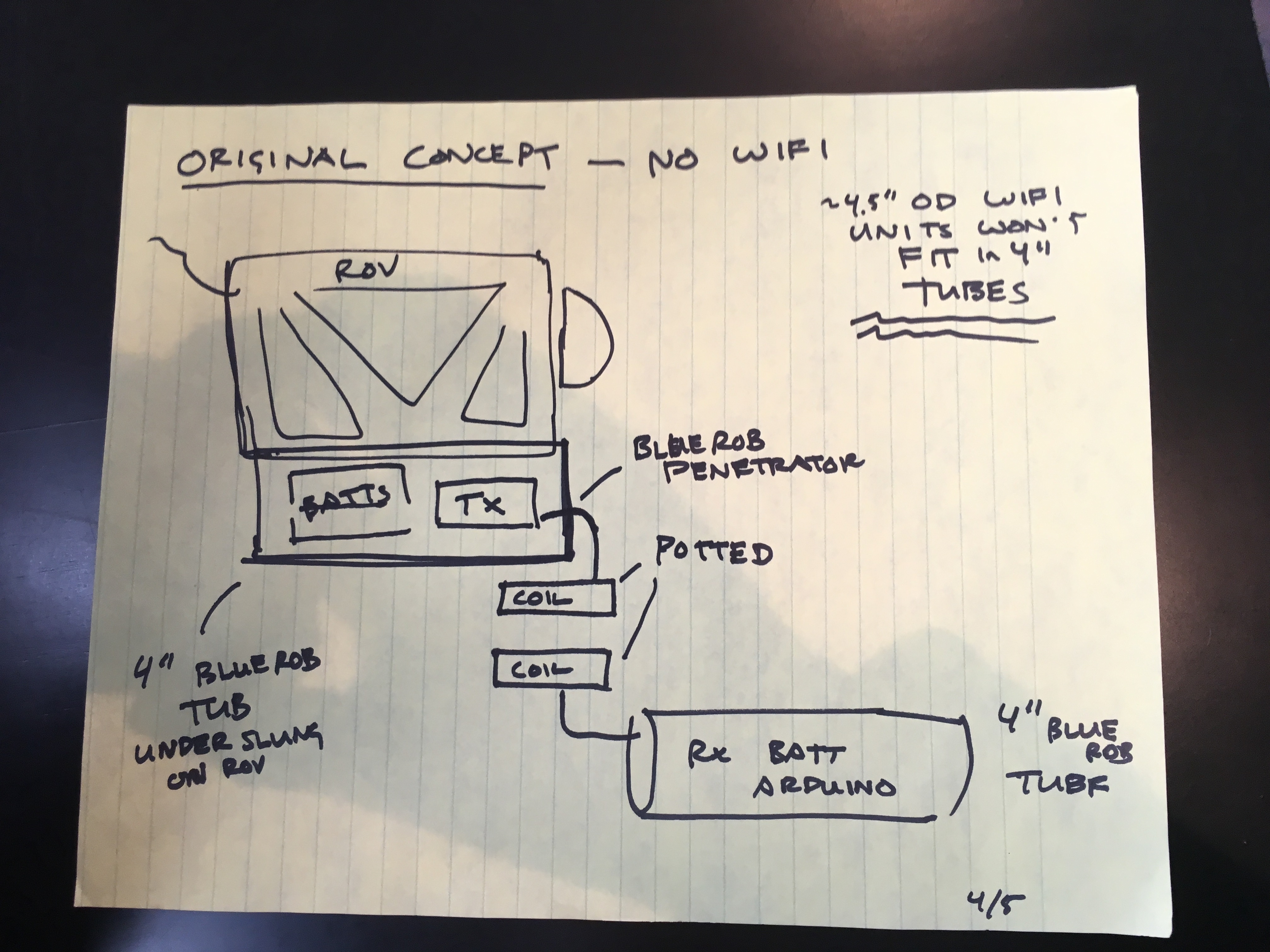
but neither the Wibotic transmitter nor the SXT will fit in a 4" tube. There’s also the question about getting good alignment between the antennae. Again, this made sense when the Wibotic coil was potted and outside the enclosure, but it gets more challenging with the wifi.
My current idea is to embed everything in a rectangular solid enclosure:
{:center}
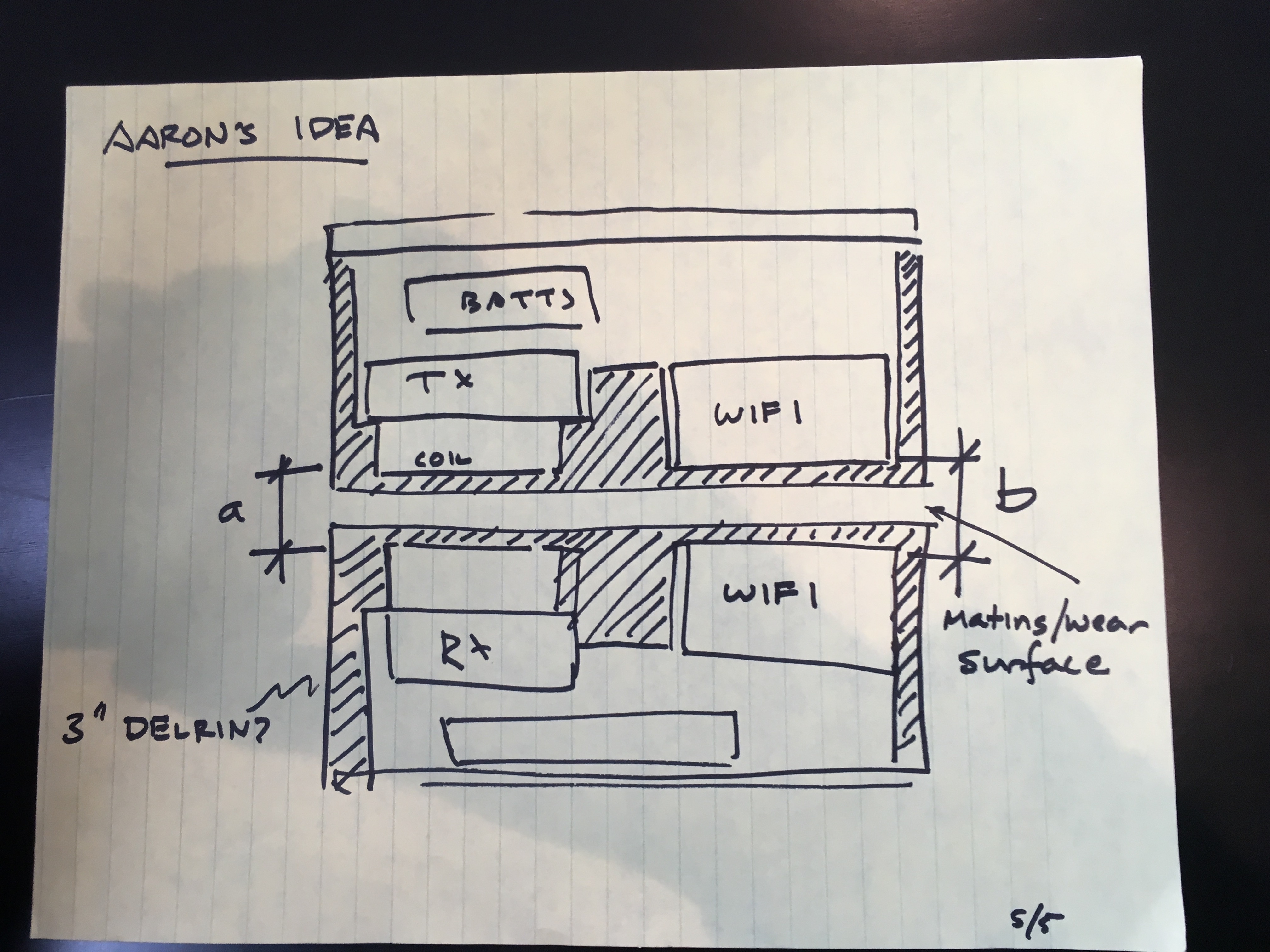
Like a void hogged into a 3" thick piece of Delrin. Wasteful but easy to get it to 100' deep and easy/cheap to make (I think). For reference, we need to keep distances “a” and “b” as small as possible. Sub-inch at best.
I particularly like the idea of pointing both of the antennae out one of the broadsides of the “shoebox.” Then alignment is just placing those two broadsides against each other.
For example the box could slung under the ROV, and the ROV would just “land” on a transfer pad on the sensor node. A cage or garage could be used for alignment and to retain the ROV during charging.