CATEGORIES
Sample MaSCOT Data
I’m still parsing and processing all of the sample data I gathered with MaSCOT over the summer, but I’ve had a few requests for sample data.
I tested the system at two resolutions: VGA (640x480 @ 30fps) and HD1080 (1920x1080 @ 15fps) — the frame rate is reduced when running on the Jetson board.
For these initial trials I focused on capturing Stereolabs-format SVO files, knowing I could then transcode them in to images, feed them back through the processing software, etc. I biased my testing towards the VGA-resolution images as I knew I was more likely to work with the smaller, lower-res files.
While testing, my two priorities were to capture imagery of my calibration target to estimate the lens distortions in water, and to capture imagery of “interesting” 3D targets in the water. I scheduled my testing to coincide with the burn-in of the RSN shallow profilers in preparation for their summer 2016 operations and maintenance cruise. This provided a nicely-sized 3D target for imaging.
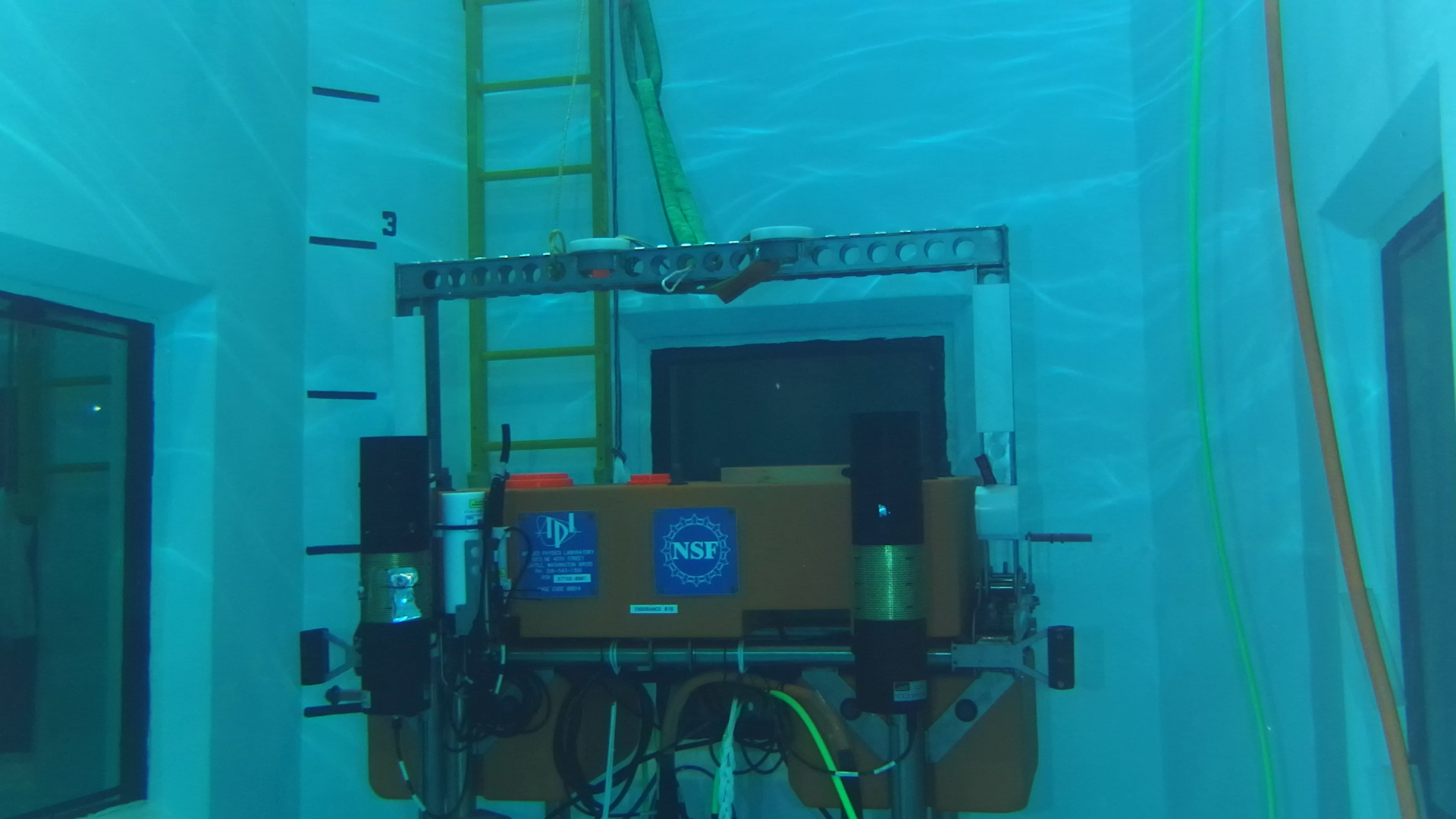
Sample images at 1920x1080
Left sample image (1920x1080)
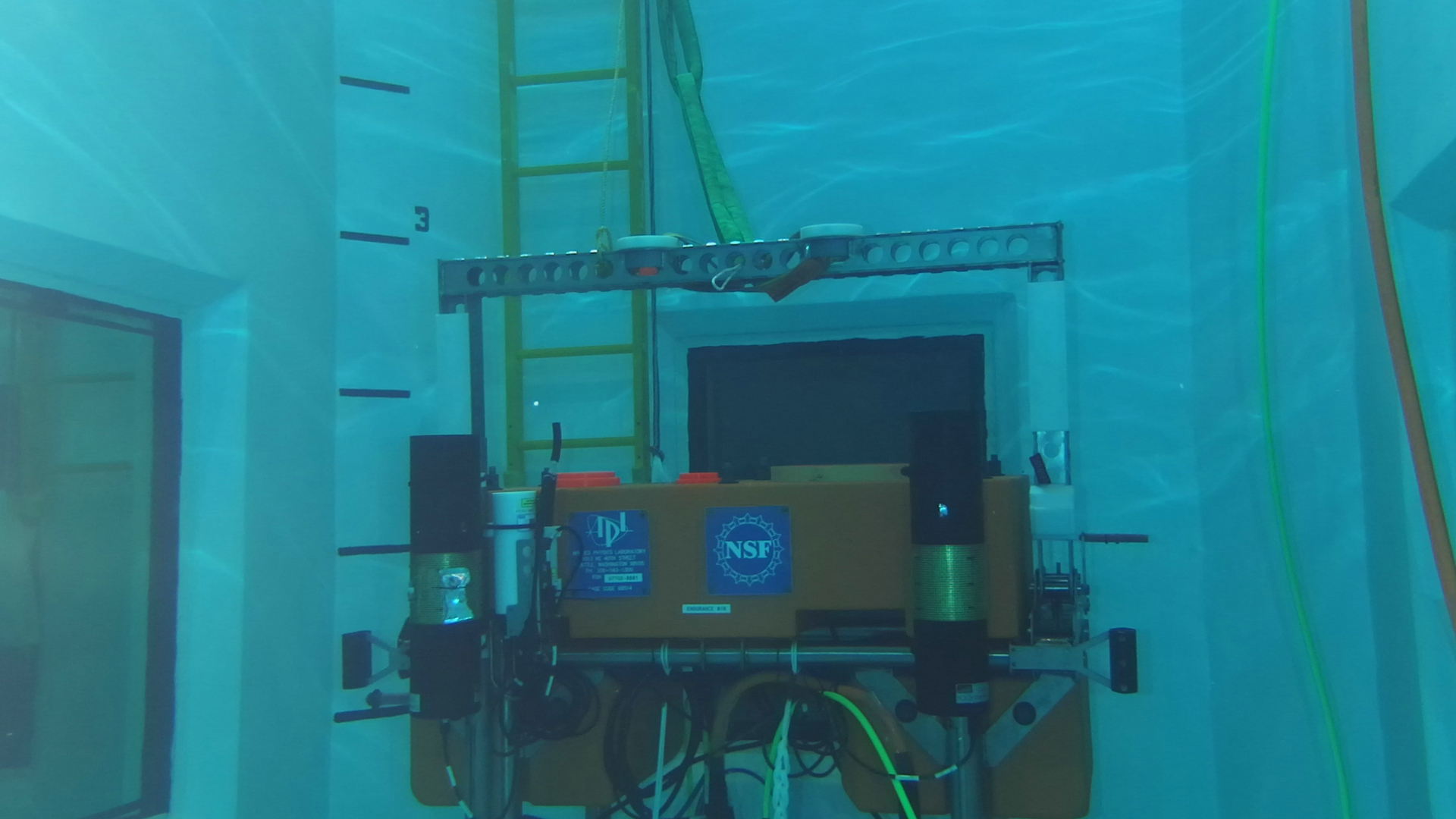
Right sample image (1920x1080)
The resulting depth map (after correction for the in-water distortions) is:
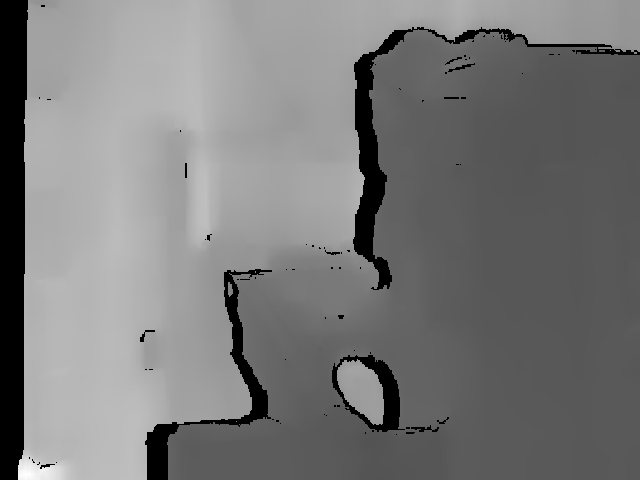
Calculated depth map (1920x1080)

Note that the Zed dense depth algorithm reports a true depth value (as a true metric value in mm, though units are configurable in the API). To make the depth image, the depth value for one image is normalized such that farthest point is 100% white. The darker the pixel, the closer. I did not adjust the lower end of the spectrum; black (0% white) corresponds to zero depth. Black also corresponds to regions where it couldn’t calculate depth.
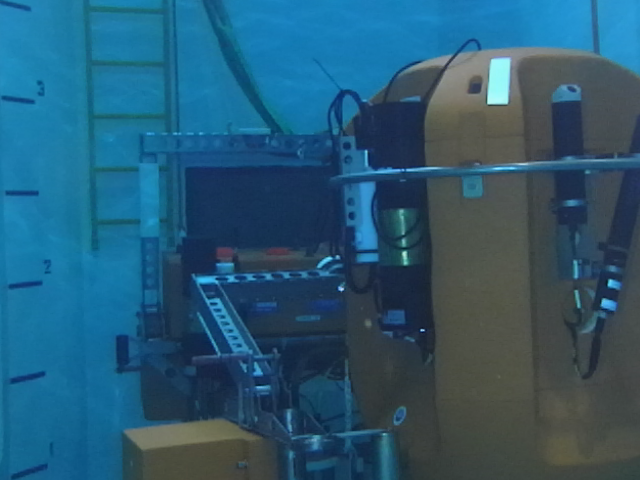
Sample images at 640x480
Here are similar results at VGA resolution:
Left sample image (640x480)
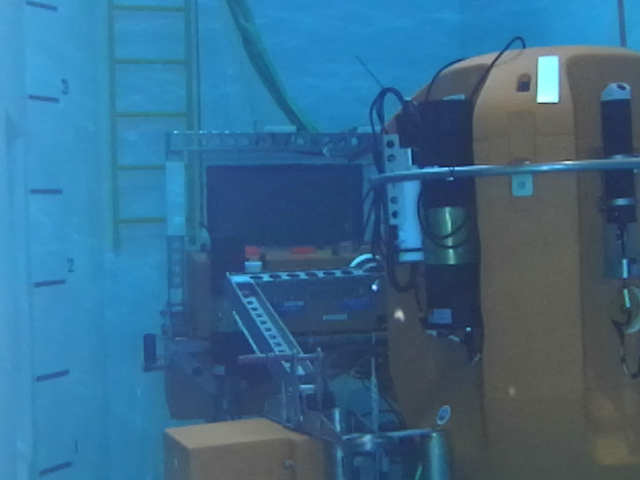
Right sample image (640x480)
Calculated depth image (640x480)
Sample movies
These videos are posted off-site, please let me know if the links break…
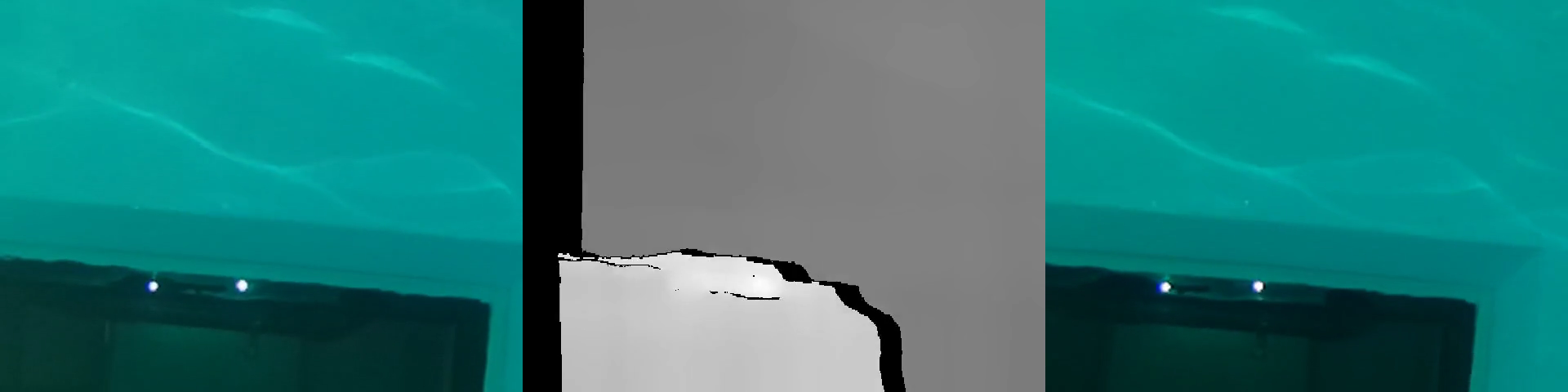
I’ve also posted a few videos. These are just quick composites which show the left, right, and depth images together.
VGA resolution, (113 MB .mp4 file)
(also available as an mkv, I was getting weird artifacts from the MP4 compression in some movies)
HD resolution, (155 MB .mp4 file, also as mkv)

The movies run slightly slower than realtime.
The videos reveal a couple of big flaws that are not apparent in the still images. First, there’s a bug somewhere in my recording software which causes dropped frames. This leads to “jerkiness”.
Second, I don’t have anywhere near enough light on the camera head. This leads to dark images, blurring, and artifacts where the color and exposure change. This might also be one of the causes of problem number one, if the camera’s integration time is exceeding the frame period.
The “flickering” in the depth image is due to the normalization – it’s not a flaw in the data (or its much worse than any flaws in the data). As the normalization is calculated on a frame-by-frame basis, the mapping from depth to brightness changes.