Using Ambient Sound to Passively Monitor Sea Surface Processes
Jeffrey A Nystuen and Barry
Ma
Applied Physics Laboratory
University of Washington
1013 NE 40th Street
Seattle,Washington 98105 USA
nystuen@apl.washington.edu
Abstract
Making measurements of surface weather conditions in oceanic regions is relatively difficult, and yet these data are needed for many types of climatic and process studies of air-sea interaction. Passive monitoring of the underwater sound field offers a means to make these measurements, as several air-sea interaction processes are responsible for the production and modification of underwater sound in the ocean. In the frequency range from 500 Hertz to 50 kHz, natural sources of underwater sound include breaking wind waves and precipitation. Unique characteristics of these sound sources allow them to be identified and then quantified. Furthermore, distortion of these acoustic signals by sub-surface ambient bubbles permits the detection and quantification of the near-surface bubbles, a potential indication of gas transfer and sea state condition. Since 1999 long-term ambient sound measurements have been made from several of the deep ocean moorings making up part of the Tropical Atmosphere Ocean (TAO) array in the tropical Pacific Ocean. Examples of acoustic wind speed measurement, rainfall detection and measurement, and ambient bubble detection are presented. This acoustic remote sensing technique is passive and can be made from a variety of oceanic platforms, including surface moorings, drifters or bottom-mounted systems. It introduces no acoustic disturbance into the environment and thus poses no potential harm to marine mammals or other forms of life in the ocean. [Work sponsored by ONR, NSF and NOAA.]
Keywords: Ambient Noise,
Rainfall Measurement, Wind Speed Measurement, Bubbles
Introduction
Remote sensing of ambient sound in the ocean provides
information about the processes generating the sound and about the intervening
media modifying the sound. This allows
passive monitoring of environmental conditions from simple and robust sensors,
namely hydrophones. Hydrophones can be
deployed from a wide variety of platforms including surface1,2 and
subsurface moorings3,4 and from drifters5. As with other remote sensing techniques, the
hydrophones are deployed away from the surface and do not interfere with the
physical processes being measured.
Furthermore, as a passive remote sensing measurement, there is no
acoustic disturbance into the environment, minimizing potential harm to marine
mammals or other forms of marine life. And it also means that fouling, and the
likelihood of vandalism and theft are reduced.
In the frequency range from 200-50,000 Hertz,
naturally generated sound at the sea surface is predominately produced by
wind-driven breaking waves and precipitation.
In turn, these physical processes generate sound principally through the
production of bubbles during splashing at the ocean surface. And on the scale of individual bubbles, the
sound is the resonant ring of newly formed individual bubbles within the
splashes6,7. Because
wind-driven breaking waves and raindrop splashes generate different
distributions of bubbles sizes, the
sound from breaking waves can be distinguished from the sound of
precipitation. This allows each sound
source to be identified and then quantitatively measured.
Bubbles can also absorb sound. Smaller bubbles are mixed downward into the
ocean surface by turbulence to form clouds, plumes and layers. Sound newly generated at the surface must
pass through these bubble structures into order to reach the measurement
hydrophone. The ambient bubbles absorb
sound principally at their resonant frequency and consequently distort the
shape of the measured sound spectrum. By quantifying this distortion, a
measurement of the ambient bubble population can be made8,9. This passive measurement of the ambient
bubble population has been observed in high wind conditions8 and
during extremely heavy rainfall10.
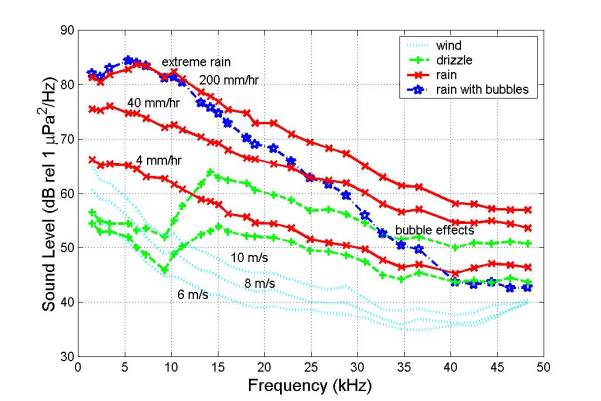
Figure 1. Examples of sound spectra recorded from geophysical sources. The effect of ambient bubbles to depress the observed sound from an extreme rain event (200 mm/hr) is shown by comparing the spectrum five minutes after the start of the event to the initial spectrum. These data are from an ocean surface mooring in the South China Sea2. The ARG was deployed at 20 m depth.
Examples of the spectral signal
for different geophysical sound sources are shown in Fig. 1. The sound
generated by wind has a distinctive shape, but is relatively quiet when
compared to the sound generated by rain.
Drizzle has a distinctive peak in the spectrum from 13-25 kHz, and the
sound of heavy rain is very, very loud.
Ambient bubbles depress the sound levels at frequencies above 20
kHz. Monitoring rainfall using ambient
sound is of particular interest as fresh water flux into the ocean is an
important part of the energy balance between the atmosphere and ocean, and is
extremely difficult to measure on all time and space scales. Rainfall produces a dominant sound
underwater when it is present.
To
take advantage of this acoustic signal, Acoustic Rain Gauges (ARGs) have been
designed and built for autonomous
deployment on ocean surface moorings. The Pacific Marine Environmental
Laboratory (PMEL), National Atmospheric and Ocean Administration (NOAA) has
established the Tropical Atmosphere Ocean (TAO) array of roughly 70 ATLAS
(Autonomous Temperature Line Acquisition System) ocean surface moorings across
the tropical Pacific Ocean to monitor environmental conditions11. Several of these surface moorings, in
particular, moorings at 8°, 10° and 12°N, 95°W and at 0°, 165°E, have been augmented with ARGs. Long-term time series are now being
collected to establish scientific confidence in the acoustic measurements of
rainfall and wind speed. This paper reports preliminary comparisons of ARG
measurements of rainfall and wind speed with surface instrumentation on these
moorings.
METHODOLOGY
Acoustic Rain Gauges (ARGs)
The Acoustic Rain Gauges (ARGs)
consist of an ITC-8263 hydrophone, signal pre-amplifiers and a recording
computer (Tattletale-8). The nominal sensitivity of these instruments is -160
dB relative to 1 V/mPa and the equivalent oceanic background noise level of the
pre-amplifier system is about 28 dB relative to 1 mPa2Hz-1. Band-pass filters are present to reduce
saturation from low frequency sound (high pass at 300 Hz) and aliasing from
above 50 kHz (low pass at 40 kHz). The ITC-8263 hydrophone sensitivity also
rolls off above its resonance frequency, about 40 kHz. A data collection
sequence consists of four 1024 point time series collected at 100 kHz (10.24 ms
each) separated by 5 seconds. Each time
series is fast Fourier transformed (FFT) to obtain a 512-point (0-50 kHz) power
spectrum. These four spectra were averaged together and spectrally compressed
to 64 frequency bins, with frequency resolution of 200 Hz from 100-3000 Hz and
1 kHz from 3-50 kHz. These spectra are evaluated individually to detect the
acoustic signature of rainfall and then are recorded internally.
The overall temporal sampling
strategy is designed to allow the instrument to record data for up to one year
and yet detect the relatively short rainfall events present in the tropics12. In order to achieve this, the ARG is
designed to enter a low power mode "sleep mode" between each data
sample. For these deployments, the ARGs
"sleep" for 8 minutes and then sample the sound field. If
"rain" is detected, the sampling rate changes to 1 minute (or 4
minutes if "drizzle" is detected) and stays at the higher sampling
rate until rain is no longer detected.
Some "noise" will trigger the high sampling mode and must be
removed from the data.
A sound source at a free
surface, the ocean surface, is an acoustic dipole, radiating sound energy
downward in a cos2q pattern where q is the zenith angle. This allows the intensity of surface generated
sound at some depth, h, below the
surface to be given by:
![]() (1)
(1)
where
I0 is the sound intensity
at the surface and atten(p) describes
the attenuation due to geometric spreading and absorption along the acoustic
path, p. If the sound source is
uniform at the surface and absorption and refraction are neglected, the
measurement should be independent of depth. For any particular deployment, the
attenuation along the acoustic path can be complicated, but have only resulted
in minor corrections in other studies1. The ARGs have been deployed at 38 m depth on the mooring lines
(wire cable). The depth was chosen to be above the thermocline, lessening the
effects of acoustic refraction, and to maximize sampling area, so that the buoy
itself does not occupy a significant portion of the effective listening area.
Equation (1) can be used to estimate the effective sampling area at the
surface. Neglecting refraction and
absorption, 90% of the signal is arriving from a sampling area equal to:
sampling area @ p(3h)2 (2)
where h is the depth of the ARG. The
integrating area of the hydrophone is important for two reasons. First, rainfall is inhomogeneous on all
scales, but rainfall measurements are needed on large temporal or spatial
scales. An instrument with a large
inherent sampling area should produce a better “mean” rainfall statistic.
Second, the large spatial sampling allows the short temporal sampling periods
being used for each data sample to include many individual raindrop splashes.
Acoustical Measurements of Wind Speed and Rainfall Rate
Inversion of the underwater
ambient sound field consists of two general components: identifying the source
of the sound, and then quantifying it.
Acoustic classification of weather5 has identified four ocean
surface features producing distinctive features in the sound spectrum from 1-50
kHz. These are wind, drizzle, heavy
rain and ambient bubbles present (Fig. 1).
Once classification is obtained, there are several algorithms available
to quantify wind speed1 and precipitation10.
Acoustical Rainfall Rate Measurements
Two types of acoustic rainfall
rate algorithms are available. Because different raindrop sizes have
distinctive acoustic signatures underwater, the underwater sound can be
decomposed into components associated with each drop size. This allows an acoustic measure of the drop
size distribution in the rain10. Once a drop size distribution is
obtained, then rainfall rate can be calculated. While the sound field can be
"inverted" to measure drop size distribution, the algorithm used here
is a simpler empirical algorithm relating the sound level at 5 kHz (SPL5) to the rainfall rate R. This algorithm is based on empirical correlation of sound levels
to 10-minute accumulation data from the R.M. Young rain gauge using data from 0°, 165°E (March 2000-July 2001), and from 10°N, 95°W (Dec 2000-Mar 2001).
log10(R) = (SPL5 - 42.4)/15.4
(3)
Acoustical Wind Speed Measurements
An algorithm for the acoustic
quantification of wind speed is available1. After sound records containing noise,
including precipitation, are removed, the sound level at 8 kHz, SPL8, is empirically related
to 10-m height wind speed, U10,
by
![]() (4)
(4)
Comparison Data
R.M. Young rain gauges
Precipitation measurements on
Next Generation ATLAS moorings are made using R.M. Young Model 50202
precipitation gauges, which have been modified by PMEL for integration into the
ATLAS electronics13. The sensors are mounted approximately at 3 m
above mean sea level on the buoy tower. These sensors have a 100 cm2
catchment cylinder mounted atop a funnel which leads water into a cylindrical
measuring tube. Water height within the tube is determined by measuring
capacitance. The measuring tube has a storage capacity of 500 ml, representing
50 mm of rainfall accumulation, after which it automatically drains via a
siphon. Siphon events take about 30 seconds, and are typically identified by
sharp declines in volume for 2 consecutive samples. In real-time processing,
these events are ignored.
The R.M. Young gauge reports a
water level within its collection chamber each minute, and calculates the
difference to obtain a rainfall rate for that minute. Inspection of 1 minute
rain data from recovered moorings of the TAO array indicates that instrumental
noise levels are generally low, a few tenth of mm hr-1, relative to
the signals of interest14.
The estimated instrumental error for 10-minute derived rainfall rates is
0.4 mm hr-1. Other sources
of noise include undercatch of rainfall in high winds, excessive buoy motion,
sea spray, and evaporation from the cylinder. These errors are extremely
difficult to quantify.
TRMM Precipitation Product 3B42
The Tropical Rain Measuring
Mission (TRMM) is a satellite dedicated to the measurement of precipitation in
the tropics. Rainfall sensors include a
precipitation radar (PR), a microwave imager (TMI) and a visible/infrared sensor
(VIRS). Data from these instruments are
combined in a variety of ways to produce rainfall products which are available
through the NASA Goddard Distributed Active Archive Center (DAAC)15. The rainfall product 3B-42 is a daily
precipitation product spatially averaged on a 1º by 1º grid using the infrared
sensor (VIRS) with monthly calibration adjustments from the combined PR/TMI
data (Product 2B31).
Results
The desired geophysical signal
is usually persistent and, in the case of rain, very loud. However, in the ocean, there are other
underwater sounds which can interfere with acoustical weather
measurements. Sound spectra not
consistent with known geophysical signals (wind, rain and drizzle) are assumed
to be "noise" and are removed from the data record. This is done by
objectively using features of the spectra, i.e. levels, slopes and peaks to
identify the sound source, and also subjectively by examining all events that
triggered the high sampling mode of the ARGs.
Loud low frequency noise was present for extended periods of time during
several of the deployments. It is
thought that this is flow/splash noise associated with strong local currents on
the surface float of the mooring. At
the end of several deployments, physical rattling of the mounting cage is also
thought to produce loud low frequency noise.
At these times, acoustical measurements of surface processes could not
be obtained. At other times, short
duration noises due to shipping or biological activity are recorded. In general, these do not interfere with the
geophysical interpretation of the sound signal.
Figure 2 shows time series of oceanic underwater sound at 3 different frequencies. The different sources of sound are identified by comparing spectral intensity levels, spectral shapes and temporal variances of sound intensities. Fig. 3 shows the quantitative acoustic interpretation of the time series shown in Fig. 2. Wind speed agreement is excellent for winds above 3 m/s. For wind speeds below 3 m/s, there is no wave breaking at the ocean surface, and thus there is no acoustic signal with which to measure the wind speed. Acoustic detection of rainfall events is excellent.
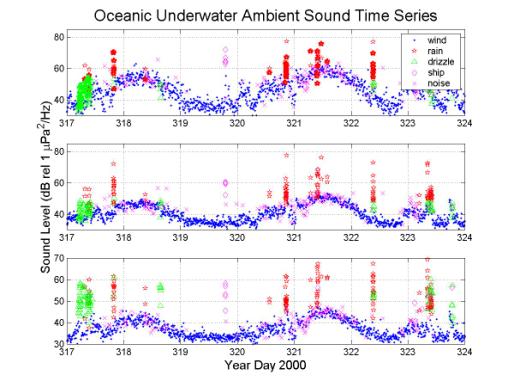
Figure 2. An example of a time series of oceanic underwater sound at 3 different frequencies (3, 8.5 and 21 kHz) recorded from an Acoustical Rain Gauge (ARG) mounted on a deep ocean mooring at 40 meters depth. The mooring is part of the NOAA TAO array and is located at 10ºN, 95ºW.
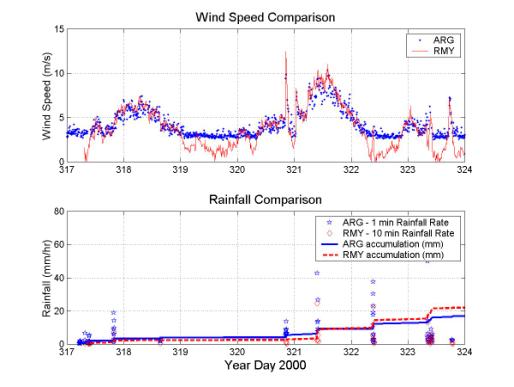
Figure
3. Geophysical interpretation of the ambient sound time series shown in Fig.
2. Quantitative comparison of the
acoustic measurement to surface-mounted R.M. Young sensors is shown.
Validation of Wind Speed Measurements
Figure 4. A comparison of wind speed measurements from
the ATLAS mooring anemometer and the ARG for December 1999 at 8°N, 95°W.
Figure 4 shows an example of the
comparison of acoustical and surface measurements for wind speed. The buoy
winds have been corrected to equivalent 10 m height using the COARE V2.5b bulk
flux algorithms16 and then smoothed with a 30-minute binomial
filter. The mean absolute difference between the ARG measurement and the
anemometer is 0.5 ± 0.4 m/s. The bias is less than 0.1 m/s. Note that the acoustic wind speed algorithm does not allow values
less than 2.2 m/s. Similar agreement is
observed for the other months.
Validation of Rainfall Measurements
Rainfall accumulations for the
Year 2000 at the TAO moorings at 8°, 10° and 12°N, 95°W are shown in Figure 5.
This part of the ocean has a distinctive rainy season beginning in May
and lasting into October. Exact
agreement between the TRMM estimate and the other two methods should not be
expected. The sampling strategies are
very different (spatial averaging versus high temporal resolution). However,
seasonal agreement should be expected.
And except for a few “events,” this agreement is observed. But the figure also shows the difficulty
associated with obtaining rainfall measurements at sea. The comparison suggests that the R.M. Young
(RMY) gauge at 12°N, 95°W did not work at the beginning of the
rainy season, but started working later in the season, and that the RMY gauge
did not work well at 10°N, 95°W.
Furthermore, the surface instrumentation was stolen at 8°N, 95°W in July, but the sub-surface instrumentation, including
the ARG was not taken. Nevertheless,
quantitative agreement between the RMY measurement and the ARG measurement when
both instruments are working is promising.
Data collection is ongoing and further comparisons will become
available.
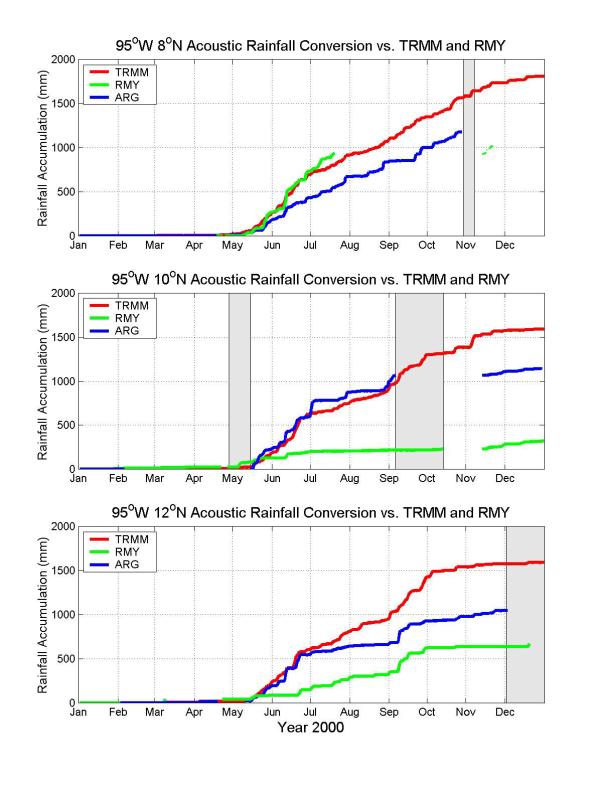
Figure 5. Comparison of rainfall accumulation for the Year 2000 at the TAO moorings at 8°, 10° and 12°N, 95°W using the acoustic measurement (ARG), surface rain gauges (RMY) and TRMM satellite estimates. The shading regions indicate times when persistent local mooring noise prevented acoustic measurements. The ARGs were deployed at 38 m depth on the mooring lines. This figure highlights differences. If single large events are missed by an instrument, the curves diverge. Times when the curves are parallel indicate agreement.
Conclusions
The first deployments of ARGs on ocean surface moorings show the promise of passive acoustic remote sensing to make measurements of important air-sea processes, in particular, for rainfall detection and measurement, wind speed measurement and ambient bubble detection. The acoustic wind speed measurement shows excellent agreement with the ATLAS mooring anemometers, with a bias of less than 0.1 m/s and an absolute mean difference of 0.5 ± 0.4 m/s for wind speeds from 2-12 m/s (30-minute smoothed wind speed data). Acoustic detection of rain events is excellent. Quantitative estimates of rainfall accumulations between the acoustic method, surface rain gauges and satellite estimates show only general agreement, and highlight the difficulty of making rainfall measurements at sea.
Acknowledgements
The TAO Project Office, Dr. Michael McPhaden, Director, at NOAA/PMEL maintains the TAO mooring arrays and has facilitated the deployment and recovery of the ARGs on the TAO moorings. Development of the ARGs for deployment on ocean moorings was sponsored by the Pan American Climate System (PACS) program in the Office of Global Programs (OGP) of NOAA. Additional funding is from the National Science Foundation and the Office of Naval Research (ONR) Ocean Acoustics. Dr. Weimin Wang, NOAA/PMEL, made the calculations for the adjusted 10 m wind speeds for the buoy anemometer.
References
1 Vagle S,
Large WG and Farmer DM. 1990: An evaluation of the WOTAN technique for
inferring oceanic wind from underwater sound. J. Atmos. and Ocean. Tech. 7, 576-595.
2 Nystuen
JA, McPhaden MJ and Freitag HP, 2000: Surface measurements of precipitation
from an ocean mooring: The Acoustic Log
from the South China Sea. J. Appl. Meteor. 39, 2182-2197.
3 Evans DL,
Watts DR, Halpern D and Bourassa S. 1984: Oceanic winds measured from the
seafloor. J. Geophys. Res. 89,
3457-3461.
4 Lemon
DD, Farmer DM and Watts DR. 1984: Acoustic measurements of wind speed and
precipitation over a continental shelf. J.
Geophys. Res. 89, 3462-3472.
5 Nystuen JA and Selsor HD 1997: Weather classification using
passive acoustic drifters. J.Atmos. and
Oceanic Tech., 14, 656-666.
6 Medwin H
and Beaky MM, 1989: Bubble sources of the Knudsen sea noise spectrum. J. Acoust. Soc. Am. 83, 1124-1130.
7 Medwin H, Nystuen JA,
Jacobus PW, Ostwald LH and Synder DE. 1992: The anatomy of underwater rain
noise. J. Acoust. Soc. Am. 92,
1613-1623.
8 Farmer DM and Lemon DD. 1984: The
influence of bubbles on the ambient noise in the ocean at high wind speeds. J.
Phys. Oceanogr. 14, 1762-1778.
9 Nystuen
JA and Farmer DM. 1989: Precipitation
in the Canadian Atlantic Storms Program: Measurements of the acoustic
signature. Atmosphere-Ocean 27, 237-257.
10 Nystuen
JA. 2001: Listening to raindrops from underwater: An acoustic disdrometer. J.
Atmos. and Oceanic Tech. 18,
1640-1657.
11 McPhaden MJ, Busalacchi AJ,
Cheney R, Donguy JR, Gage KS, Halpern D, Ji M, Julian M, Meyers G, Mitchum GT,
Niiler PP, Picaut J, Reynolds RW, Smith N and Takeuchi K. 1998: The Tropical
Ocean-Global Atmosphere (TOGA) observing system: A decade of progress. J. Geophys. Res, 103, 14,169-14,240.
12 Nystuen
JA. Temporal sampling requirements for
autonomous rain gauges. J. Atmos. and Oceanic Tech., 1998; 15,
1254-1261.
13 Milburn
HB, McLain PD and Meinig C. 1996: ATLAS buoy - Reengineered for the next
decade. In Proceedings of IEEE Oceans'96,
Fort Lauderdale, FL, pp 698-702.
14 Serra Y, Hearn PA, Freitag
HP and McPhaden MJ. 2001: ATLAS Self-siphoning rain gauge error estimates.
J.Atmos.and Oceanic Tech.
15 NASA
Goddard Distributed Active Archive Center, http://daac.gsfc.nasa.gov.
16 Fairall CW, Bradley EF,
Rogers DP, Edson JB and Young GS. 1996: Bulk parameterization of air-sea fluxes
for Tropical Ocean-Global Atmosphere Coupled-Ocean Atmosphere Response
Experiment. J. Geophys. Res. 101, 3747-3764.